En el mundo de la automatización industrial y los sistemas de adquisición de datos (DAQ), la comunicación rápida, determinista y eficiente es fundamental. EtherCAT, un protocolo de comunicación desarrollado por Beckhoff Automation, ha surgido como una solución poderosa para satisfacer estas demandas, ofreciendo un control preciso y un ancho de banda optimizado que supera las limitaciones del Ethernet convencional en aplicaciones de tiempo real. Este artículo explora en detalle qué es EtherCAT, cómo funciona, sus características clave y por qué se ha convertido en un estándar en la industria.
Una Breve Historia de Ethernet: Los Cimientos de la Comunicación
Para comprender la innovación que representa EtherCAT, es crucial revisar los orígenes de Ethernet. Desarrollada en la década de 1970 en el Palo Alto Research Center (PARC) de Xerox, Ethernet fue concebida como una interfaz de red de bajo costo y tolerante a fallas para redes locales y de área amplia. En aquel entonces, competía con otras tecnologías como TokenBus, TokenRing y ARCNET. El científico de PARC, Robert Metcalfe, se enfrentó al desafío de interconectar cientos de computadoras para compartir la primera impresora láser del mundo. La solución implicó combinar tecnologías de Internet con ideas innovadoras, dando lugar a la red que hoy conecta millones de dispositivos a nivel global.
Formalmente estandarizado bajo IEEE-802.3 en 1985, Ethernet se convirtió en la interfaz de facto para redes de diversos tamaños e incluso para instrumentos individuales. Su diseño se basa en la división de la información en "paquetes" o "marcos" (datagramas), cada uno conteniendo datos, información de encabezado, direcciones de identificación y una verificación de redundancia cíclica (CRC) de 32 bits para la detección de errores. Cada dispositivo en la red posee una dirección Ethernet única, esencial para que los datos lleguen a su destino correcto.
El funcionamiento de Ethernet puede visualizarse como un sistema postal. Imagínese miles de cartas (datagramas) fluyendo por una calle, algunas dirigidas a usted y otras a sus vecinos. Cada "carta" contiene la información necesaria para que su "buzón" (dispositivo) la reconozca y la reensamble correctamente. Aunque este sistema es robusto y ampliamente adoptado, su naturaleza inherente presenta limitaciones para aplicaciones que exigen precisión temporal absoluta.
EtherCAT: La Evolución para el Control en Tiempo Real
EtherCAT (Ethernet for Control Automation Technology) nació de la necesidad de superar las limitaciones de latencia y determinismo de Ethernet en el ámbito de la automatización industrial. Beckhoff Automation, un fabricante líder de controladores lógicos programables (PLCs), buscó una solución más eficiente que su propia tecnología "LightBus" de finales de los 80. El resultado fue EtherCAT, presentado al mundo en 2003 y cuyos derechos fueron donados al EtherCAT Technology Group (ETG) en 2004. El ETG, responsable de la promoción del estándar, cuenta con un activo grupo de desarrolladores y usuarios, y EtherCAT está estandarizado según IEC 61158.
¿Por Qué EtherCAT y No Ethernet Convencional?
La pregunta fundamental es: ¿por qué no utilizar Ethernet directamente para interconectar sistemas DAQ y de control? Ethernet es rápido, económico y fácil de implementar. Sin embargo, su principal debilidad radica en la falta de determinismo, es decir, la precisión del tiempo. Mientras que en el ejemplo del correo, la llegada de cartas puede variar, en sistemas de control industrial, la latencia (el tiempo que tarda un mensaje en viajar) debe ser mínima y predecible. Un mensaje de apagado de emergencia no puede verse retrasado por un flujo masivo de datos de respaldo. En un sistema Ethernet convencional, todos los datos son tratados con la misma prioridad, lo que funciona para la navegación web o el acceso a servidores, pero no para las aplicaciones en tiempo real que requieren una respuesta instantánea y predecible.

Capas Físicas y de Enlace de Datos: La Base de EtherCAT
EtherCAT aprovecha las capas físicas y de enlace de datos de Ethernet, manteniendo la compatibilidad con la infraestructura existente. La capa física se refiere al hardware que transmite los datos, el "núcleo eléctrico" de la red. La capa de enlace de datos codifica la información en paquetes. Aquí es donde EtherCAT se diferencia significativamente.
Al omitir las capas 3 a 6 del modelo OSI (como la capa de red y la capa de transporte, que incluyen protocolos como IP, TCP y UDP), EtherCAT logra tiempos de ciclo inferiores a 100 µs y una fluctuación de comunicación (jitter) inferior a 1 µs. Esta optimización drástica en las capas superiores es lo que permite a EtherCAT reducir los tiempos de ciclo de Ethernet, que suelen ser del orden de 10 ms, en varios órdenes de magnitud. La tasa de datos efectiva se mantiene en 100 Mbps.
Diferencias Topológicas y de Operación: EtherCAT vs. Ethernet
Las diferencias fundamentales entre Ethernet y EtherCAT residen en cómo se gestionan las capas superiores y la topología de la red.
Red Ethernet de Oficina Estándar
En una red Ethernet típica, varios dispositivos están conectados al mismo nivel. Cualquier dispositivo puede enviar y recibir datos. Un switch centraliza las conexiones y proporciona acceso a Internet. Esta flexibilidad, sin embargo, puede llevar a la sobrecarga de datos cuando múltiples dispositivos transmiten simultáneamente, ralentizando o bloqueando mensajes críticos para el tiempo.
Red EtherCAT con Topología en Anillo (y Más Allá)
EtherCAT opera bajo un paradigma maestro/esclavo. El dispositivo EtherCAT MASTER es el único que puede transmitir datos a través de la red. El maestro envía una cadena de datos a través del bus, eliminando las colisiones de datos inherentes a Ethernet y optimizando la velocidad.
Las tramas EtherCAT se integran dentro de una trama Ethernet estándar, identificadas por el valor 0x88A4 en el campo EtherType. Los dispositivos esclavos EtherCAT (nodos) reciben estas tramas, procesan los datos que les conciernen, agregan la información solicitada por el maestro y reenvían la trama al siguiente nodo.

La velocidad se incrementa no solo por la transmisión centralizada, sino también por una técnica llamada "procesamiento sobre la marcha" (on-the-fly processing). A diferencia de Ethernet, donde cada dispositivo debe leer el encabezado de cada mensaje para determinar si está destinado a él, en EtherCAT, el nodo procesa los datos y los reenvía simultáneamente, ahorrando un tiempo valioso. Además, EtherCAT permite combinar datos entrantes y salientes de múltiples dispositivos en cuadros únicos, optimizando aún más la velocidad. Curiosamente, si un nodo tiene una capacidad de procesamiento limitada, el maestro puede ajustar la velocidad del bus para garantizar que ningún dispositivo pierda datos.
Tolerancia a Fallos y Flexibilidad Topológica
Una característica distintiva de EtherCAT es su tolerancia a fallos inherente. Si la salida de un nodo se desconecta del maestro, los datos se devuelven automáticamente por la otra dirección a través del protocolo. Esto significa que las redes EtherCAT no están limitadas a una topología en anillo; pueden configurarse en árbol, línea, estrella o combinaciones de estas. Siempre que exista un camino de comunicación entre los esclavos y el maestro, la red funcionará. Los sistemas EtherCAT no requieren switches como los de Ethernet, y las longitudes de cable de hasta 100 metros entre nodos son posibles. El uso de LVDS en cables de par trenzado permite altas velocidades con bajo consumo de energía, y la fibra óptica puede emplearse para aumentar la velocidad y el aislamiento galvánico.
Datos con Sello de Tiempo: El Determinismo de EtherCAT
Uno de los aspectos más cruciales de EtherCAT es su reloj distribuido. Cada nodo marca la fecha y hora de los datos al recibirlos y al reenviarlos. Cuando el maestro recibe los datos, puede determinar con precisión la latencia de cada nodo. Cada transmisión de datos del maestro recibe una marca de tiempo de E/S de cada nodo, lo que hace que EtherCAT sea mucho más determinista y preciso en el eje temporal que Ethernet.
Además, el maestro realiza una transmisión inicial a todos los nodos esclavos, quienes la "bloquean" al recibirla y al devolverla. El maestro repite este proceso automáticamente para sincronizar los nodos esclavos y minimizar la fluctuación. Esta precisión de sincronización, con un rendimiento de jitter inferior a un microsegundo (equivalente al protocolo IEEE 1588 PTP sin hardware adicional), es vital para la automatización de fábricas y el control en tiempo real, y facilita la integración de sistemas DAQ como los de Dewesoft en sistemas de control.
KOTLER CAPÍTULO 7 😊 (7.7) | La Selección de VENTAJAS COMPETITIVAS en un EMPRESA
EtherCAT en Sistemas DAQ y de Control
Los sistemas que utilizan EtherCAT se dividen principalmente en dos categorías: control y medición. Tradicionalmente, los PLCs actúan como maestros y los dispositivos de medición como esclavos. Sin embargo, Dewesoft ha introducido un tercer tipo de dispositivo: un sistema DAQ que combina la adquisición de datos de alta velocidad a un host con la transmisión de datos EtherCAT a un PLC o software de control maestro.
Históricamente, para obtener datos en tiempo real de un sistema DAQ en un PLC, se utilizaban múltiples salidas analógicas del DAQ, lo que requería numerosas entradas analógicas en el PLC y una conversión de datos redundante. Dewesoft, al integrar un puerto esclavo EtherCAT en sus sistemas DAQ, elimina la necesidad de estas entradas analógicas redundantes, permitiendo que los datos en tiempo real se envíen a través de una única línea EtherCAT. Sistemas como IOLITE e IOLITEd incluso pueden reemplazar el hardware del PLC en muchas aplicaciones, al conectarse a una computadora host que ejecuta software PLC en tiempo real.
Comparativa: Ethernet vs. EtherCAT
| Característica | Ethernet | EtherCAT |
|---|---|---|
| Capas de enlace y física | Comunes | Comunes |
| Estándar internacional | IEEE-802.3 | IEC 61158 |
| Tiempo determinista | No | Sí |
| Operación maestro/esclavo | No (comunicación peer-to-peer) | Sí |
| Topología basada en anillos | No requerido | Sí (con tolerancia a fallos) |
| Optimizado para control T.R. | No | Sí |
| Optimizado para evitar col. | No | Sí |
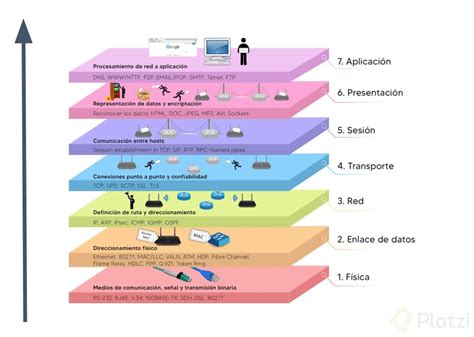
Capa Física y Capa de Enlace de Datos: Una Mirada Más Profunda
El modelo OSI describe la comunicación de red en siete capas. La capa física (Capa 1) se ocupa de la transmisión de bits puros a través de un medio físico, como cables eléctricos o fibra óptica. No se preocupa por la entrega de bits sin errores; esa es la función de la capa superior. La capa de enlace de datos (Capa 2), por otro lado, gestiona la comunicación dentro de la misma red local (LAN). Utiliza direcciones MAC para el direccionamiento físico, detecta y corrige errores mediante sumas de verificación, y controla el flujo de datos para evitar la sobrecarga. Los switches de Capa 2 operan en esta capa, utilizando tablas de direcciones MAC para dirigir el tráfico.
Ethernet opera principalmente en estas capas inferiores, pero su implementación para aplicaciones en tiempo real se ve limitada por las capas superiores. EtherCAT, si bien utiliza las mismas capas físicas y de enlace de datos, rediseña radicalmente el flujo de información en las capas superiores para lograr su rendimiento superior en determinismo y ancho de banda.
En el contexto de las redes inalámbricas, términos como "ancho de banda", "canal" y "velocidad de transmisión" son cruciales. El ancho de banda se refiere a la cantidad de datos que se pueden transmitir en un período de tiempo determinado, a menudo medido en Hertz (Hz) para la frecuencia o en bits por segundo (bps) para la capacidad de datos. Los canales son rangos de frecuencia específicos dentro de una banda de operación. La velocidad de transmisión se refiere a la tasa a la que los datos se envían, medida en bps. Tecnologías como Wi-Fi utilizan diferentes anchos de banda (20 MHz, 40 MHz) y canales para optimizar la comunicación y minimizar interferencias.
El estándar 802.11n, por ejemplo, introdujo el concepto de ancho de banda de 40 MHz (doble canal) para aumentar la velocidad de transmisión, pero esto puede requerir una gestión cuidadosa para evitar interferencias con redes cercanas. La configuración del canal de control y el canal de extensión son fundamentales para que los dispositivos operen correctamente en estas configuraciones de mayor ancho de banda.
Conclusión
EtherCAT representa un avance significativo en la comunicación para sistemas de control y adquisición de datos en tiempo real. Al optimizar radicalmente las capas superiores del modelo de red y adoptar un enfoque determinista maestro/esclavo, EtherCAT ofrece un rendimiento, una precisión temporal y una flexibilidad que superan con creces las capacidades de Ethernet convencional en aplicaciones críticas. Su capacidad para integrarse con la infraestructura de Ethernet existente, junto con su robustez y tolerancia a fallos, lo posicionan como una tecnología indispensable para la automatización industrial moderna y los sistemas DAQ de alto rendimiento.