La automatización industrial moderna se caracteriza por una transición significativa desde los sistemas de control tradicionales, donde cada dispositivo requería su propio cableado individual, hacia arquitecturas de bus de comunicaciones. Estos sistemas de bus permiten interconectar múltiples dispositivos a través de un único cable, ofreciendo una reducción considerable en la cantidad de cableado necesario y, por ende, en los costos de instalación y mantenimiento. Dentro de este panorama, Foundation Fieldbus emerge como uno de los protocolos de bus de comunicación más populares y ampliamente adoptados en la industria.
Estructura Básica de una Configuración Fieldbus
Foundation Fieldbus, desarrollado y administrado por la Fieldbus Foundation - una organización colaborativa de fabricantes de equipos de automatización, sensores y actuadores - abarca dos protocolos principales diseñados para satisfacer las diversas necesidades de los entornos de fabricación automatizada. Ambos protocolos comparten la misma base conceptual pero difieren en sus medios físicos y velocidades de comunicación.
Protocolo H1: La Base de la Comunicación de Campo
El primer protocolo es el H1, que opera a una velocidad de 31.25 kb/s. Este protocolo está típicamente asociado a la conexión de dispositivos de campo, tales como sensores, actuadores, válvulas, luces de control y unidades de entrada/salida (E/S). Una de sus características distintivas es la capacidad de comunicación bidireccional entre los dispositivos y el controlador. El H1 soporta tanto la comunicación de datos como la alimentación eléctrica a través de un sistema de dos cables. Para mitigar las interferencias por ruido inherentes a las redes, se recomienda el uso de cableado estándar de par trenzado apantallado.
Protocolo HSE: Velocidad para Controladores Avanzados
El segundo protocolo es HSE (High-Speed Ethernet), que opera a una velocidad considerablemente mayor de 100 Mb/s. El HSE se emplea habitualmente para conectar controladores de alta velocidad, como los Controladores Lógicos Programables (PLC), así como para enlazar varios subsistemas H1 (a través de un dispositivo de enlace), servidores de datos y estaciones de trabajo. Si bien este artículo se centra en el protocolo H1, es importante comprender la existencia y el propósito del HSE en la arquitectura general de Fieldbus.
Estructura de Red Fieldbus H1
La arquitectura de una red Fieldbus H1 se compone de varios elementos clave que determinan su topología y rendimiento.
Cableado y Topologías de Red
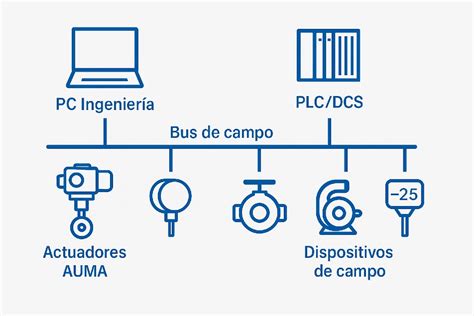
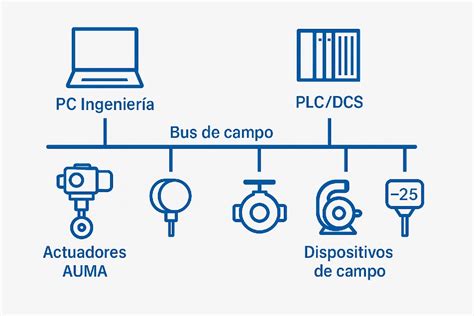
La red Fieldbus H1 comprende un cable de red principal (línea troncal) que interconecta una serie de cajas de conexiones o acopladores. Estos acopladores facilitan la conexión de los dispositivos de campo y el controlador al cable principal. Los cables de menor longitud que conectan las cajas de conexiones con los dispositivos se denominan derivaciones.
Las cajas de conexiones pueden configurarse para conectar uno o varios dispositivos a la línea troncal. Cuando cada dispositivo tiene su propia caja de conexiones dedicada, se habla de una topología de derivaciones. Si varios dispositivos comparten la misma caja de conexiones, la configuración se denomina comúnmente topología en árbol. En la práctica, las redes mixtas, que combinan ambas topologías, son las más habituales.
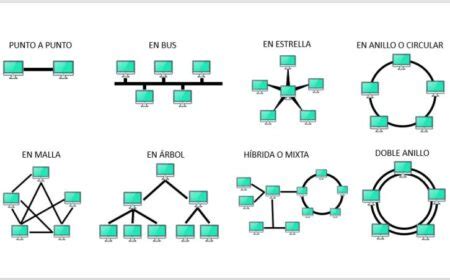
Aunque teóricamente es posible conectar la línea troncal directamente entre dispositivos sin cajas de conexiones (una topología en cascada), la experiencia demuestra que este enfoque es menos práctico. Dicha configuración requiere interrumpir la línea troncal cada vez que se añade o se retira un dispositivo, lo que complica la gestión de la red.
Limitaciones de Tamaño y Extensión de la Red
La tecnología Fieldbus impone ciertas limitaciones en cuanto al tamaño y la extensión de una red. La longitud máxima combinada de la línea troncal y todas sus derivaciones dentro de una sección es de 1.900 metros (aproximadamente 6.250 pies). Para superar esta limitación, se pueden añadir secciones adicionales mediante el uso de repetidores. Un repetidor, que se instala en lugar de un dispositivo de campo, permite extender la longitud del cable en otros 1.900 metros. Una red Fieldbus H1 puede utilizar hasta un máximo de cuatro repetidores, alcanzando una longitud total de hasta 9.500 metros.
Consideraciones sobre el Apantallamiento y la Tierra
Es crucial tener en cuenta que el apantallamiento del cableado debe conectarse a la resistencia de tierra en un único punto de todo el sistema. La conexión del apantallamiento en múltiples puntos puede generar tensiones y corrientes de dispersión que interfieren con las comunicaciones de datos, degradando el rendimiento de la red.
Número Máximo de Dispositivos
El número máximo de dispositivos de bus de campo que se pueden conectar por cada sección de la red es de 32. Este límite garantiza que la carga en la línea troncal se mantenga dentro de parámetros operativos óptimos.
Alimentación y Terminación de la Red
Para el correcto funcionamiento de la red Fieldbus H1, es necesaria una fuente de alimentación de CC que proporcione la tensión de polarización o corriente continua requerida por los dispositivos. Conectar una fuente de alimentación de CC directamente a la línea troncal crearía un cortocircuito para las señales de CA. Por este motivo, la red debe utilizar una fuente de alimentación conforme a Fieldbus, que consiste en una fuente de CC con un filtro dedicado. Este filtro permite el paso de la corriente continua con mínima pérdida, al tiempo que presenta una alta impedancia a las señales de CA procedentes de la red.
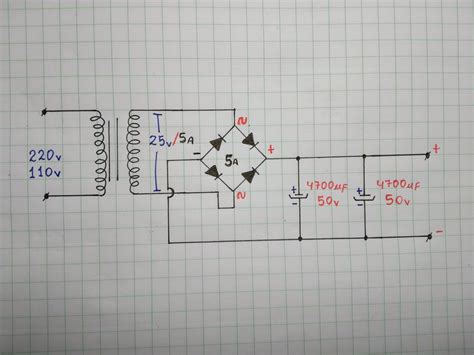
La línea troncal actúa como una línea de transmisión, donde la velocidad de propagación de las señales de CA es un factor crítico. Las conexiones apropiadas en cada extremo de la línea troncal son esenciales para las señales de CA. Estas conexiones se realizan mediante resistencias de terminación con una impedancia igual a la impedancia nominal del cable, generalmente de 100±20 Ω. Dado que la red también debe soportar la tensión de alimentación de CC, los terminadores incorporan condensadores en serie para prevenir el flujo de corriente continua a través de ellos.
Ejemplo 2: La tensión en Fieldbus incluye la tensión de alimentación de CC y la señal del bus.
Diagnóstico y Resolución de Problemas en Redes Fieldbus H1
La detección y resolución de problemas en redes Fieldbus H1 puede realizarse mediante herramientas especializadas como el dispositivo Fluke ScopeMeter. A continuación, se abordan algunos conceptos básicos relacionados con el diagnóstico de red.
Detección de Reflejos
Los reflejos en una red de comunicaciones pueden afectar negativamente a la transmisión de datos. Estos reflejos se producen cuando una señal encuentra una discontinuidad o una anomalía en la línea de transmisión, como un cortocircuito o una conexión defectuosa.
Consideremos el escenario en el que se aplica una tensión tipo escalón al extremo de un cable largo con un cortocircuito en el otro extremo. Inicialmente, la tensión aplicada interactúa con la impedancia del cable, generando un nivel de tensión entre los conductores. Esta tensión escalón se propaga por el cable a una velocidad determinada por su tipo y construcción. En las redes Fieldbus H1, esta velocidad es aproximadamente dos tercios de la velocidad de la luz en el vacío, es decir, 2 x 10⁸ m/s (o 660 x 10⁶ pies/s).
Cuando la tensión escalón alcanza el cortocircuito, el nivel de tensión cae bruscamente a cero. Este cambio se manifiesta como una tensión escalón de polaridad inversa que viaja de regreso hacia la fuente. El proceso de reflexión se completa cuando esta señal reflejada alcanza el punto de inicio. El tiempo que tarda este proceso depende de la longitud del cable. El tiempo de desplazamiento en una dirección es igual a la longitud del cable dividida por la velocidad de la señal.
Para la longitud máxima de una sección H1 Fieldbus (1900 m), el tiempo de viaje en una dirección es aproximadamente 9.5 µs. El tiempo total de ida y vuelta para una tensión escalón en una línea troncal de longitud máxima es de 19 µs.
Dado que una red H1 Fieldbus opera a 31.25 kb/s, con un ciclo de reloj de 32 µs, es previsible observar reflejos de pulsos retrasados hasta 19 µs si existe una anomalía en el cable. El tiempo de reflexión real varía según la distancia entre la fuente del pulso y la anomalía.
Si bien un cortocircuito completo genera un reflejo de máxima amplitud, cualquier perturbación o desviación de la homogeneidad de la línea puede provocar un reflejo, cuya amplitud dependerá de la naturaleza de la anomalía. Para asegurar una comunicación de red fiable, es fundamental evitar los reflejos y mantener conexiones de cableado adecuadas. Un aspecto clave es la correcta terminación de la línea, que requiere un único terminador en cada extremo de una sección troncal.
Clase 1: Osciloscopio aplicado al CAN BUS
Codificación Manchester
En Fieldbus, los datos digitales se transmiten utilizando la codificación Manchester. En este esquema, el dígito '1' se representa mediante un flanco de subida a mitad de un ciclo de reloj (la mitad de un bit), mientras que el dígito '0' se codifica con un flanco de bajada. Esta técnica de codificación ofrece varias ventajas sobre la transferencia binaria directa. Una ventaja importante es la regeneración sencilla de la señal de reloj en el extremo receptor.
Ejemplo 3: Codificación, transmisión y decodificación Manchester.
Otra consecuencia de la codificación Manchester es que los impulsos generados tienen una duración de medio ciclo de reloj o de ciclo completo. La secuencia de bits original incluye impulsos de uno o varios ciclos de reloj completos. La tensión resultante en el bus se puede observar de forma esquemática en el Ejemplo 2. El Ejemplo 4 muestra el registro de una forma de onda real de un paquete de datos, con la tensión de polarización de CC filtrada.
Ejemplo 4: Tren de impulsos básico, medido con un osciloscopio en un sistema Fieldbus.
Generación de Señales Eléctricas
Si se pudiera acceder a los dos hilos de un cable de línea troncal en cualquier punto, se observarían dos secciones de cable que se extienden en direcciones opuestas desde el punto de acceso. Eléctricamente, estas dos secciones se comportan como si estuvieran conectadas en paralelo. Por lo tanto, la impedancia en cualquier punto de la línea es igual a la impedancia de las dos secciones del cable en paralelo. En una caja de conexiones, la impedancia observable es típicamente de 50 Ω, la mitad del valor de impedancia nominal del cable.
La señal del bus se genera aplicando una corriente diferencial en el sistema de dos cables del bus. La amplitud pico a pico nominal (Vpp) de la señal generada por cualquier dispositivo Fieldbus debe ser de al menos 750 mVpp, según las especificaciones Fieldbus.
Idealmente, esta sería también la amplitud de la señal recibida por los dispositivos Fieldbus. Sin embargo, debido a la atenuación de la señal en la red, la señal de entrada suele ser de menor amplitud. Las especificaciones Fieldbus requieren que los dispositivos funcionen correctamente con señales de entrada de al menos 150 mVpp. Si la amplitud de la señal recibida supera los 1.000 mVpp, esto suele indicar un error en la red, como la ausencia de un terminador.
Anomalías y su Impacto en la Señal
La conexión de un dispositivo adicional de baja impedancia en cualquier punto del bus reduce la impedancia total observable en las cajas de conexiones, ya que la carga adicional se conecta en paralelo a la impedancia del cable. Una menor impedancia del bus resulta en una menor amplitud de las señales del bus. Dado que las señales del bus son impulsos que pueden considerarse aleatorios, esta carga adicional actúa como una discontinuidad en la línea de transmisión, generando reflejos de los impulsos originales en el punto de conexión. Estos reflejos distorsionan la forma de onda del impulso, lo que puede llevar a una detección incorrecta de la señal.
Por ejemplo, si se conecta un tercer terminador, la impedancia total de la red y la amplitud de la señal descienden a dos tercios del valor nominal. La pérdida de señal provoca impulsos más distorsionados, dificultando la correcta detección de la señal.
Diversidad de Protocolos Fieldbus
Si bien Foundation Fieldbus H1 es un protocolo ampliamente utilizado, es importante reconocer que Fieldbus es un término genérico que abarca una variedad de protocolos de comunicación, cada uno con sus propias características y aplicaciones. La elección del protocolo de bus de campo adecuado depende de las tareas específicas requeridas por el sistema de automatización.
Foundation Fieldbus (H1 y HSE)
Como se detalló anteriormente, Foundation Fieldbus ofrece dos protocolos, H1 para dispositivos de campo y HSE para interconexiones de alta velocidad, ambos gestionados por la Fieldbus Foundation.
PROFIBUS
PROFIBUS, desarrollado conjuntamente por Siemens y otras empresas alemanas, se ha consolidado como un estándar de bus de campo industrial líder en Europa. Se presenta en varias versiones:
- PROFIBUS FMS (Fieldbus Message Specification): El protocolo PROFIBUS más antiguo, utilizado para tareas de comunicación complejas en entornos de taller.
- PROFIBUS DP (Decentralized Periphery): Diseñado para comunicaciones de alta velocidad entre controladores y dispositivos de campo distribuidos, como unidades de E/S y variadores. Su objetivo es reducir los costos de cableado y mano de obra en instalaciones con un gran número de sensores y actuadores.
- PROFIBUS PA (Process Automation): Comparte el protocolo de comunicación con PROFIBUS DP y puede interconectarse con él a través de dispositivos de conversión, permitiendo la integración de la alta velocidad de PROFIBUS DP como columna vertebral de la red.
DeviceNet
DeviceNet, originado en los Estados Unidos y basado en la tecnología CAN, es una solución de red de automatización rentable. Permite conectar equipos industriales básicos con un mínimo de cableado. Sus especificaciones y protocolos son abiertos, y su adopción es impulsada por la Open DeviceNet Vendors Association (ODVA). DeviceNet soporta la alimentación del bus y la conexión en caliente de equipos, ofreciendo diagnósticos a nivel de dispositivo y una reducción significativa en los costos de cableado e instalación.
CANopen
CANopen es un protocolo de comunicación de red abierta que se actualiza a partir del bus CAN (Controller Area Network). Desarrollado inicialmente por BOSCH para la comunicación en la industria automotriz, CANopen define protocolos de aplicación de alto nivel basados en la capa física CAN, adaptándose a diversas aplicaciones de control industrial.
AS-Interface (AS-i)
AS-Interface ha superado las normativas internacionales y se utiliza ampliamente. Este sistema de bus de campo opera bajo una estructura maestro-esclavo, donde el host y el controlador AS-Interface (IPC, PLC, DC) se denominan colectivamente "maestro del sistema".
CC-Link
CC-Link (Control & Communication Link) es un bus de campo abierto lanzado por Mitsubishi Electric de Japón. Se basa principalmente en la capa de dispositivos y puede transmitir grandes cantidades de datos a alta velocidad, cubriendo también capas de control de nivel superior. Una red CC-Link puede constar de un maestro y hasta 64 esclavos. La velocidad de transferencia de datos puede alcanzar los 10 Mb/s, y el protocolo de comunicación subyacente sigue RS 485.
EtherCAT
EtherCAT (Ethernet for Control Automation Technology) es una solución Ethernet en tiempo real para la automatización industrial. Su alto rendimiento y facilidad de uso lo han posicionado como un líder en el campo.
Otros Protocolos Relevantes
Existen otros protocolos de bus de campo importantes en la automatización industrial, cada uno con sus propias fortalezas:
- Interbus: Un bus de campo probado basado en fibra óptica, conocido por su inmunidad a EMI, instalación sencilla y flujo de datos rápido y determinista.
- Lightbus: Otro sistema de bus de fibra óptica de Beckhoff, que ofrece una instalación sencilla y un flujo de datos rápido, cíclico y determinista.
- ControlNet: Un sistema de bus de campo estándar abierto que permite el intercambio simultáneo de datos cíclicos y acíclicos sin interferencias.
- SERCOS: Desarrollado originalmente como un sistema de bus de fibra óptica de alta velocidad para unidades, permite la transmisión de datos de alta velocidad y tiempos de ciclo cortos.
- PROFINET: Un estándar de Ethernet industrial abierto desarrollado por la PNO (PROFIBUS User Organization).
Beneficios Clave de la Tecnología Fieldbus
La adopción de la tecnología Fieldbus en la automatización industrial ofrece una serie de beneficios tangibles:
- Rendimiento en Tiempo Real: Proporciona supervisión y control en tiempo real de los dispositivos de campo, crucial para procesos dinámicos.
- Resistencia a Interferencias y Tolerancia a Fallos: Garantiza un funcionamiento estable incluso en entornos industriales hostiles, gracias a su robustez y mecanismos de detección de errores.
- Protocolos Abiertos y Compatibilidad: Admite el acceso a diversos dispositivos de diferentes fabricantes, fomentando la interoperabilidad y la flexibilidad del sistema.
- Alta Flexibilidad: Permite la configuración y expansión de los sistemas según las necesidades cambiantes, adaptándose a los requisitos específicos de cada aplicación.
- Reducción de Cableado: Utiliza una red de comunicación unificada, lo que disminuye drásticamente la cantidad de cableado requerido en comparación con los sistemas tradicionales.
En resumen, la tecnología Fieldbus, con sus diversas implementaciones de baja y alta velocidad, representa un avance fundamental en la automatización industrial, ofreciendo soluciones eficientes, fiables y flexibles para la comunicación digital entre dispositivos de campo y sistemas de control.