La comunicación inalámbrica se ha convertido en un pilar fundamental en el desarrollo de proyectos de electrónica, y el módulo nRF24L01, en conjunto con la plataforma Arduino, ofrece una solución accesible y potente para implementar transmisiones de datos a 2.4 GHz. Sin embargo, los entusiastas de la robótica y la electrónica a menudo se encuentran con obstáculos, especialmente al intentar compilar y ejecutar el código necesario para establecer esta comunicación. Este artículo se adentra en los desafíos comunes que surgen al compilar transmisiones con el nRF24L01 en un entorno Arduino, proporcionando una guía detallada para superar estos errores y lograr una conexión punto a punto exitosa.
Introducción al Módulo nRF24L01 y su Integración con Arduino
El módulo nRF24L01+ es un transceptor de radiofrecuencia (RF) de ultra bajo consumo (ULP) que opera en la banda ISM de 2.4 GHz. Diseñado para la comunicación inalámbrica de alta velocidad, soporta tasas de transferencia de hasta 2 Mbps. Su integración con Arduino se realiza a través de la interfaz SPI (Serial Peripheral Interface), un protocolo de comunicación síncrona que permite el intercambio de datos entre microcontroladores y periféricos.
Este tutorial se enfoca en el uso de dos módulos nRF24L01+, cada uno conectado a un Arduino Uno. El objetivo es enviar un string de un máximo de 10 caracteres, incluyendo los caracteres de retorno de carro (\r) y nueva línea (\n), a través del monitor serial de su respectivo puerto COM. La configuración del monitor serial se establece en modo de retorno de carro.
La arquitectura del nRF24L01+ es notable por su alta integración y eficiencia energética. Con corrientes de operación inferiores a 14 mA y un rango de voltaje de alimentación de 1.9 a 3.6 V, este módulo es ideal para aplicaciones que requieren una larga duración de la batería, pudiendo alcanzar meses o incluso años de funcionamiento con pilas de botón o baterías AA/AAA. El módulo integra un transceptor RF de 2.4 GHz que se comunica con el microcontrolador de la aplicación mediante una interfaz SPI de alta velocidad.
Materiales Necesarios para la Conexión
Para llevar a cabo este proyecto de comunicación inalámbrica, se requerirán los siguientes componentes:
- Módulo de comunicación inalámbrica nRF24L01+ (2 unidades): Estos son los transceptores que permitirán la transmisión y recepción de datos.
- Arduino Uno (2 unidades): Las placas de desarrollo que actuarán como microcontroladores para controlar los módulos nRF24L01.
- Cables USB (2 unidades): Para programar los Arduinos y alimentarlos.
Conexión Física de los Módulos NRF24l01 con Arduino
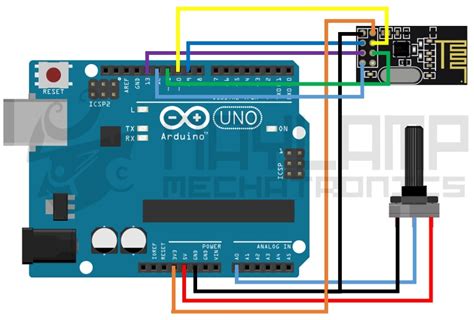
La correcta conexión física entre los módulos nRF24L01 y los Arduinos es crucial para el funcionamiento del sistema y para evitar errores de compilación o de comunicación. La interfaz SPI se compone de varios pines clave:
- VCC: Alimentación del módulo (generalmente 3.3V).
- GND: Tierra.
- CE (Chip Enable): Pin de habilitación del chip. Usualmente conectado a un pin digital del Arduino.
- CSN (Chip Select Not): Pin de selección del chip. Usualmente conectado a un pin digital del Arduino.
- SCK (Serial Clock): Pin de reloj SPI. Conectado al pin SCK del Arduino.
- MOSI (Master Out Slave In): Pin de datos salientes del maestro SPI (Arduino) hacia el esclavo (nRF24L01). Conectado al pin MOSI del Arduino.
- MISO (Master In Slave Out): Pin de datos entrantes del esclavo SPI (nRF24L01) hacia el maestro (Arduino). Conectado al pin MISO del Arduino.
- IRQ (Interrupt Request): Pin de interrupción (opcional, pero útil para optimizar la recepción de datos).
Es importante verificar la hoja de datos específica del módulo nRF24L01 que se está utilizando, ya que algunos pines pueden tener funciones adicionales o requerir configuraciones particulares. Una conexión incorrecta de estos pines es una causa frecuente de errores de compilación o de que el módulo no sea detectado por el Arduino.
Errores Comunes de Compilación y sus Soluciones
Al intentar compilar un sketch de Arduino que utiliza la librería nRF24L01, pueden surgir diversos errores. Estos errores suelen estar relacionados con la configuración del entorno de desarrollo (IDE de Arduino), la correcta inclusión de librerías, o problemas en la sintaxis del código.
1. Errores de Inclusión de Librerías
Uno de los errores más recurrentes es la falta de la librería RF24 o nRF24L01. Sin esta librería, el compilador no reconocerá las funciones y objetos necesarios para interactuar con el módulo.
Mensaje de error típico:'RF24' does not name a type'radio' was not declared in this scope
Solución:Asegurarse de que la librería RF24 esté instalada en el IDE de Arduino. Para ello, se puede ir a Sketch > Include Library > Manage Libraries.... En la ventana del Gestor de Librerías, buscar "RF24" y seleccionar la versión más reciente (generalmente desarrollada por TMRh20) para instalarla.
Si la librería ya está instalada, verificar que la sentencia de inclusión al principio del sketch sea correcta:
#include <RF24.h>#include <SPI.h>2. Errores de Declaración de Pines SPI
Los pines SPI (SCK, MOSI, MISO) son específicos de cada placa Arduino. Si el código intenta utilizar pines que no corresponden a la implementación SPI del Arduino Uno, puede generar errores de compilación o fallos de comunicación.
Mensaje de error típico:(Aunque no siempre genera un error de compilación directo, puede llevar a un comportamiento errático o a la no detección del dispositivo).
Solución:Para Arduino Uno, los pines SPI son fijos:
- SCK: Pin 13
- MOSI: Pin 11
- MISO: Pin 12
Al instanciar el objeto RF24, se deben especificar los pines CE y CSN, pero los pines SPI se manejan automáticamente si se usa la librería SPI.h. La instanciación básica del objeto RF24 es:
// Define los pines CE y CSNconst int CE_PIN = 9; // Pin CE conectado al Arduinoconst int CSN_PIN = 10; // Pin CSN conectado al ArduinoRF24 radio(CE_PIN, CSN_PIN);Si se utilizan otros pines para CE y CSN, asegurarse de que estén correctamente definidos.
3. Errores de Configuración de la Comunicación SPI
La comunicación SPI entre el Arduino y el nRF24L01 debe estar correctamente inicializada. Esto incluye configurar la velocidad del reloj SPI y el orden de bits.
Mensaje de error típico:(Similar a los errores de declaración de pines, puede no ser un error de compilación directo, sino un fallo en la comunicación que impide la detección del módulo).
Solución:La librería RF24 se encarga de la mayor parte de la configuración SPI. Sin embargo, es fundamental asegurarse de que el método radio.begin() se ejecute correctamente. Este método intenta comunicarse con el módulo nRF24L01. Si falla, a menudo se debe a una conexión incorrecta o a un problema de alimentación.
void setup() { Serial.begin(9600); SPI.begin(); // Inicializa la comunicación SPI if (!radio.begin()) { Serial.println("Error al inicializar el módulo nRF24L01. Verifique las conexiones y la alimentación."); while (1); // Detiene la ejecución si la inicialización falla } else { Serial.println("Módulo nRF24L01 inicializado correctamente."); } // Configuración adicional del radio (canales, potencia, etc.) radio.setChannel(0x48); // Canal de comunicación radio.setPALevel(RF24_PA_MAX); // Nivel de potencia de transmisión radio.setDataRate(RF24_2MBPS); // Velocidad de datos radio.openReadingPipe(1, 0xF0F0F0F0F0LL); // Abre el canal de recepción radio.startListening(); // Comienza a escuchar}Si radio.begin() devuelve false, es crucial revisar las conexiones físicas, especialmente los pines SPI, CE, CSN, VCC y GND. Asegurarse de que el módulo nRF24L01 esté recibiendo la tensión de alimentación correcta (generalmente 3.3V, no 5V, ya que puede dañarlo).
4. Errores de Sintaxis en el Código
Errores de sintaxis, como puntos y comas faltantes, paréntesis desbalanceados, o el uso incorrecto de funciones de la librería, son comunes en cualquier proyecto de programación.
Mensaje de error típico:expected ';' before '}' token'variableName' was not declared in this scopeinvalid conversion from '...' to '...'
Solución:Leer cuidadosamente los mensajes de error proporcionados por el IDE de Arduino. Estos mensajes suelen indicar la línea de código donde se produjo el error y una descripción del problema. Revisar la línea indicada y las líneas circundantes en busca de errores tipográficos, llaves o paréntesis sin cerrar, o el uso incorrecto de variables y funciones.
Por ejemplo, al enviar strings, asegurarse de que el tamaño del buffer sea suficiente para los datos a transmitir. Si se intenta enviar un string más largo que el buffer definido, puede causar corrupción de datos o errores de segmentación.
char message[11]; // Buffer para 10 caracteres + terminador nulo// ...radio.write(message, strlen(message) + 1); // +1 para el terminador nulo5. Problemas de Dirección de Comunicación
Para que dos módulos se comuniquen, deben estar configurados para "escuchar" en la misma dirección y "hablar" a la misma dirección. Si las direcciones de transmisión y recepción no coinciden, los datos no se entregarán.
Mensaje de error típico:(No es un error de compilación, sino que la comunicación simplemente no funciona; un módulo no recibe nada del otro).
Solución:En el código de cada Arduino, definir las direcciones de comunicación de manera idéntica para el receptor y el emisor. Las direcciones son típicamente números de 64 bits (long long).
Emisor (Transmisor):
const uint64_t address = 0xF0F0F0F0F0LL; // Dirección para transmitirradio.openWritingPipe(address);Receptor:
const uint64_t address = 0xF0F0F0F0F0LL; // Misma dirección para recibirradio.openReadingPipe(1, address);Es fundamental que address sea exactamente la misma en ambos scripts. Utilizar el sufijo LL para indicar que es un literal de tipo long long.
Implementación de una Comunicación Punto a Punto
El siguiente ejemplo ilustra la estructura básica de los sketches para un emisor y un receptor, enfocándose en la transmisión de un string.
Sketch del Emisor (Transmisor)
#include <SPI.h>#include <RF24.h>// Define los pines CE y CSN para el módulo nRF24L01const int CE_PIN = 9;const int CSN_PIN = 10;// Crea una instancia del objeto RF24RF24 radio(CE_PIN, CSN_PIN);// Define la dirección de comunicaciónconst uint64_t address = 0xF0F0F0F0F0LL;void setup() { Serial.begin(9600); SPI.begin(); if (!radio.begin()) { Serial.println("Error al inicializar el módulo nRF24L01."); while (1); } else { Serial.println("Módulo nRF24L01 inicializado."); } // Configuración del radio radio.setChannel(0x48); // Canal de comunicación (puede ser cualquier canal entre 0 y 127) radio.setPALevel(RF24_PA_MAX); // Nivel de potencia de transmisión radio.setDataRate(RF24_2MBPS); // Velocidad de datos radio.openWritingPipe(address); // Abre el canal de transmisión a la dirección especificada Serial.println("Listo para enviar datos.");}void loop() { // Ejemplo: enviar un mensaje simple char messageToSend[] = "Hola Mundo!"; Serial.print("Enviando: "); Serial.println(messageToSend); // Envía el mensaje. Se añade 1 para incluir el carácter nulo de terminación bool sentOK = radio.write(messageToSend, strlen(messageToSend) + 1); if (sentOK) { Serial.println("Mensaje enviado con éxito."); } else { Serial.println("Error al enviar el mensaje."); } delay(1000); // Espera 1 segundo antes de enviar el siguiente mensaje}Sketch del Receptor
#include <SPI.h>#include <RF24.h>// Define los pines CE y CSN para el módulo nRF24L01const int CE_PIN = 9;const int CSN_PIN = 10;// Crea una instancia del objeto RF24RF24 radio(CE_PIN, CSN_PIN);// Define la dirección de comunicación (debe ser la misma que la del emisor)const uint64_t address = 0xF0F0F0F0F0LL;// Buffer para recibir los datoschar receivedMessage[32]; // Tamaño suficiente para el mensajevoid setup() { Serial.begin(9600); SPI.begin(); if (!radio.begin()) { Serial.println("Error al inicializar el módulo nRF24L01."); while (1); } else { Serial.println("Módulo nRF24L01 inicializado."); } // Configuración del radio radio.setChannel(0x48); // Debe ser el mismo canal que el emisor radio.setPALevel(RF24_PA_MAX); radio.setDataRate(RF24_2MBPS); radio.openReadingPipe(1, address); // Abre el canal de recepción en la dirección especificada radio.startListening(); // Comienza a escuchar Serial.println("Listo para recibir datos.");}void loop() { if (radio.available()) { // Lee los datos recibidos en el buffer radio.read(receivedMessage, sizeof(receivedMessage)); Serial.print("Mensaje recibido: "); Serial.println(receivedMessage); }}Comunicación inalámbrica con Arduino: Tutorial NRF24L01
Consideraciones Adicionales para Evitar Errores
- Alimentación: Asegurarse de que los módulos nRF24L01 reciban una alimentación estable de 3.3V. Utilizar un regulador de voltaje si el Arduino solo proporciona 5V en sus pines. Una alimentación insuficiente o inestable es una causa común de fallos de comunicación y errores difíciles de diagnosticar.
- Condensadores de desacoplo: Se recomienda colocar un condensador de 10uF entre los pines VCC y GND del nRF24L01 para suavizar las fluctuaciones de voltaje durante la transmisión.
- Longitud del string: El límite de 10 caracteres para el string, incluyendo
\ry\n, debe ser respetado. Si se necesita enviar más datos, se deben implementar técnicas de segmentación o utilizar un protocolo más avanzado. - Compatibilidad de librerías: Asegurarse de que la versión de la librería
RF24sea compatible con la versión del core de Arduino que se está utilizando. - Prueba de conexión: Antes de intentar enviar datos, es buena práctica ejecutar un sketch de prueba simple que solo verifique si el módulo es detectado por el Arduino (
radio.begin()).
Superar los errores de compilación al trabajar con el nRF24L01 y Arduino requiere un enfoque metódico. La comprensión de la conexión física, la correcta inclusión de librerías y la sintaxis del código son pasos fundamentales. Al abordar sistemáticamente estos puntos, se pueden resolver la mayoría de los problemas, permitiendo la implementación exitosa de proyectos de comunicación inalámbrica. La comunicación punto a punto entre dos módulos tranceptores con el NRF24L01, controlada mediante un puerto SPI, abre un abanico de posibilidades para el intercambio de datos digitales en la frecuencia de 2.4Ghz.