El mundo de la electrónica industrial y la automatización a menudo requiere soluciones de comunicación robustas y fiables, capaces de operar en entornos desafiantes y a distancias considerables. Uno de los estándares que ha demostrado ser excepcionalmente adecuado para estas aplicaciones es el RS-485. Este artículo explora en profundidad cómo utilizar microcontroladores como Arduino para implementar la comunicación RS-485, permitiendo la transmisión de datos a larga distancia de manera eficiente y económica.
Comprendiendo el Estándar RS-485
El estándar de comunicación RS-485 es uno de los más utilizados en el sector industrial. Se basa en la transmisión diferencial, una técnica que emplea dos conductores para enviar señales. Las corrientes y tensiones en estos dos conductores son simétricas, lo que reduce significativamente la susceptibilidad al ruido y las interferencias electromagnéticas. Esta característica es crucial en entornos industriales donde el ruido eléctrico es abundante. A diferencia de tecnologías propietarias, el uso del estándar RS-485 es libre, lo que fomenta su adopción generalizada.
Bus Serie vs. Bus Paralelo: Una Clarificación
Es importante entender la terminología utilizada en la comunicación de datos. Un bus o canal de transmisión es el medio por el cual se transfieren datos entre dos componentes electrónicos. Si una carretera tiene un único carril para cada sentido, los coches viajan uno tras de otro; esto se asemeja a una comunicación serie, donde los bits de datos se envían uno tras otro. Cuando una carretera tiene varios carriles, se dice que es un bus paralelo, donde múltiples bits de datos se transmiten simultáneamente. Es crucial no confundir el concepto de "carril" de datos con el número de "cables" físicos. Un bus serie, aunque transmite datos secuencialmente, puede utilizar varios cables para diferentes propósitos (datos, control, alimentación, etc.).
Ventajas de la Comunicación Diferencial
El uso de buses diferenciales, como en el RS-485, no solo reduce las interferencias externas, sino que también genera una menor radiación electromagnética. Esto significa que la señal es menos propensa a ser afectada por el entorno y, a su vez, el propio bus emite menos "ruido" que podría interferir con otros dispositivos cercanos. El típico cable Ethernet, utilizado para conectarse a Internet desde un ordenador, es un ejemplo de un bus que emplea principios similares para garantizar una comunicación fiable.
Modos de Comunicación RS-485
El estándar RS-485 permite implementar varios modos de comunicación, cada uno con sus propias características y aplicaciones:
Simplex
En el modo simplex, la transferencia de datos es en un solo sentido. Hay un solo transmisor y pueden existir múltiples receptores. Este tipo de comunicación es común cuando se controlan dispositivos como motores, relés o luces, donde la información fluye predominantemente desde un controlador central hacia los actuadores. En este modo, uno de los dispositivos debe actuar como "maestro" y coordinar la comunicación, mientras que el resto de los dispositivos, denominados "esclavos", esperan instrucciones del maestro para iniciar su comunicación.
Half-Duplex
El modo half-duplex permite la transmisión y recepción de datos, pero no de forma simultánea. Es decir, un dispositivo puede enviar datos en un momento dado, y luego, tras un cambio de dirección, puede recibir datos. Al igual que en el modo simplex, puede presentar una arquitectura maestro-esclavo. Sin embargo, en este modo, el bus se utiliza para ambas direcciones de comunicación, y es necesario gestionar el acceso al bus para evitar colisiones.
Full-Duplex
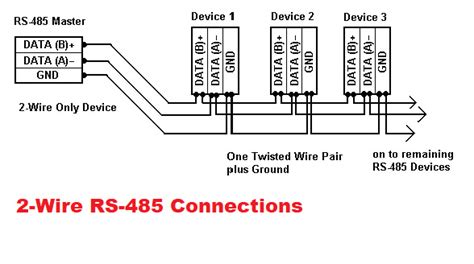
El modo full-duplex es la modalidad más compleja y requiere mayor cantidad de hardware. Permite la transmisión y recepción de datos de forma simultánea. En el contexto del RS-485, esto generalmente se logra utilizando dos pares de cables trenzados: un par para la transmisión y otro par para la recepción. Aunque puede presentar una arquitectura maestro-esclavo, en configuraciones específicas con solo dos dispositivos, ambos pueden transmitir sin riesgo de colisión. Esta configuración es precisamente la que permite utilizar el RS-485 como una extensión efectiva del puerto serie de Arduino para comunicaciones bidireccionales.
Topologías de Red RS-485
La forma en que se conectan los dispositivos en una red RS-485, conocida como topología, influye significativamente en el rendimiento y la fiabilidad de la comunicación.
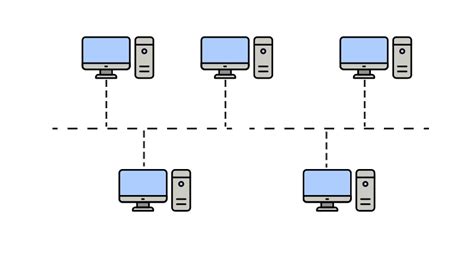
Topología de Bus Lineal
En esta topología, los dispositivos están conectados directamente al bus principal, sin ramificaciones. Esta configuración es la más recomendable ya que minimiza las reflexiones de la señal provocadas por los conductores durante la transmisión. Las reflexiones ocurren cuando una señal encuentra una discontinuidad en la impedancia del medio de transmisión, lo que puede hacer que parte de la señal "rebote" y interfiera con la señal original, degradando la comunicación.
Topología de Árbol o Estructura con Ramificaciones
En esta topología, los dispositivos se conectan a través de ramales que parten del bus principal. Si bien puede ser utilizada para redes RS-485 pequeñas, con pocos dispositivos y distancias cortas, se recomienda evitarla en la medida de lo posible. El cableado en forma de ramificaciones, especialmente si no están bien diseñadas, puede inducir reflexiones de la señal transmitida, provocando una posible pérdida de la misma. Si se utiliza esta topología, es fundamental que las ramificaciones sean mucho menores que el bus principal. El lazo que se forma en el bus en estas configuraciones puede ser perjudicial.
Consideraciones para una Comunicación Fiable
Para asegurar una comunicación RS-485 fluida y sin errores, especialmente en largas distancias y a altas velocidades, es fundamental tener en cuenta ciertos aspectos:
Resistencias de Terminación
Si tu red RS-485 excede los 100 metros de longitud o opera a una velocidad superior a 19200 bps (bytes por segundo), es muy probable que la comunicación se vea afectada o incluso imposibilitada. Para mitigar estos problemas, se deben añadir resistencias de terminación en los extremos de la red. La regla general es que el valor de estas resistencias debe ser igual a la impedancia característica del conductor utilizado. El valor típico es de 120 ohmios, común en cables de par trenzado utilizados para RS-485. Estas resistencias ayudan a absorber la energía de la señal al final del bus, minimizando las reflexiones y mejorando la integridad de la señal.
Cableado y Blindaje
La elección del cable es crucial. Se recomienda el uso de cables de par trenzado (twisted pair) para el bus RS-485. El trenzado de los conductores ayuda a reducir la diafonía (crosstalk) entre pares adyacentes y a mejorar la inmunidad al ruido. En instalaciones industriales, a menudo se incluye un tercer cable de tierra junto a los cables del bus RS-485. Este cable de tierra puede ser utilizado para conectar las carcasas metálicas de los dispositivos y el blindaje del cable, proporcionando un camino de baja impedancia para las corrientes de tierra y reduciendo aún más la susceptibilidad al ruido.
El Circuito Integrado MAX485 y Módulos Arduino
El circuito integrado MAX485 es uno de los chips más populares y accesibles para implementar la comunicación RS-485 con microcontroladores como Arduino. Este chip actúa como un transceptor, capaz de convertir las señales lógicas TTL (Transistor-Transistor Logic) de Arduino a las señales diferenciales RS-485, y viceversa.
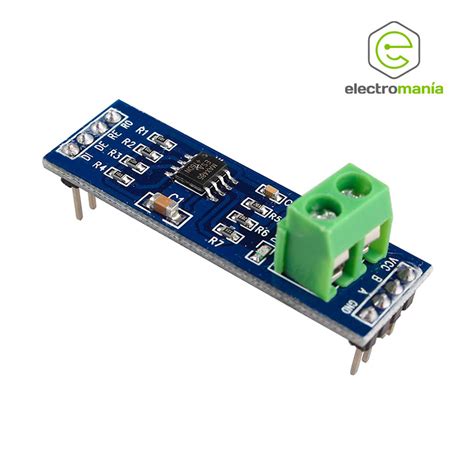
Módulos MAX485 para Arduino
El chip MAX485 se puede adquirir fácilmente dentro de módulos pre-ensamblados, diseñados para una conexión sencilla a placas Arduino. Estos módulos simplifican enormemente el proceso de implementación, ya que solo requieren conectar unos pocos pines. Plataformas de comercio electrónico como Amazon ofrecen una amplia variedad de módulos MAX485 de diferentes fabricantes.
Características del MAX485
El MAX485 es un chip de bajo consumo, diseñado para operar en un amplio rango de temperaturas, lo que lo hace apto para diversas condiciones ambientales. Presenta un encapsulado compacto de 8 pines, con las siguientes funciones principales:
- VCC: Pin de alimentación. Requiere un voltaje típicamente entre 4.75 y 5.25 voltios.
- GND: Pin de tierra.
- A y B: Pines del bus diferencial RS-485. A través de estos pines se transmite y recibe la información a/desde otro dispositivo RS-485.
- RE (Receiver Output Enable): Pin para habilitar o deshabilitar el modo de recepción. Para recibir datos, este pin debe estar en estado bajo (LOW).
- RO (Receiver Output): Pin por el cual se recibe la información enviada por otro módulo. Usualmente se conecta al pin RX del Arduino. Para que la información sea recibida, el pin RE debe estar en estado bajo.
- DE (Driver Output Enable): Pin para configurar el MAX485 en modo de transmisión. Debe ser puesto en estado alto (HIGH) para transmitir. Para desactivar la transmisión, se pone en estado bajo.
- DI (Driver Input): Pin utilizado para enviar información a otro dispositivo. Usualmente se conecta al pin TX del Arduino.
El módulo MAX485 típicamente incluye dos tri-state buffers: uno actúa como conversor serie a RS-485 (conectado a DI) y el otro como conversor RS-485 a serie (conectado a RO). Dado que la salida de uno coincide con la entrada del otro, solo se puede utilizar una función a la vez: o transmisión (DI) o recepción (RO).
Limitaciones de Voltaje
Es importante tener en cuenta que el MAX485 opera a 5V. Por lo tanto, no es posible utilizarlo directamente con placas que funcionan a 3.3 voltios, como el ESP8266. Para integrar el MAX485 con estos microcontroladores, se requerirían niveles de voltaje compatibles o un conversor de nivel lógico.
Implementación con Arduino: Ejemplos Prácticos
La conexión de un módulo MAX485 a una placa Arduino es relativamente sencilla y dependerá de la función que el microcontrolador vaya a desempeñar (maestro o esclavo) y de los puertos serie disponibles.
Configuración Básica: Maestro y Esclavo
En una arquitectura maestro-esclavo, el maestro inicia la comunicación y los esclavos responden. El maestro típicamente configura su MAX485 en modo transmisor, mientras que los esclavos lo configuran en modo receptor.
- Maestro (Arduino MEGA): El pin DI del MAX485 se conecta al pin TX del puerto serie del Arduino (por ejemplo, Serial3 en un Arduino MEGA), y los pines RE y DE se controlan para habilitar la transmisión.
- Esclavo (Arduino UNO): El pin RO del MAX485 se conecta al pin RX del puerto serie del Arduino (por ejemplo, Serial en un Arduino UNO), y los pines RE y DE se controlan para habilitar la recepción.
Cómo usar RS485
En el código, es fundamental gestionar los pines RE y DE del MAX485 para alternar entre los modos de transmisión y recepción. A menudo, estos pines se conectan a pines digitales del Arduino que pueden ser controlados por software.
Comunicación Bidireccional (Half-Duplex)
Para lograr una comunicación bidireccional donde un Arduino actúa como maestro y otro como esclavo, ambos MAX485 deben ser capaces de transmitir y recibir. Esto implica controlar los pines DE y RE de forma dinámica. Si se utiliza el puerto serie principal de un Arduino UNO, se puede emplear la librería SoftwareSerial para crear puertos serie virtuales en otros pines digitales, permitiendo así utilizar el puerto serie hardware para la comunicación RS-485.
Por ejemplo, se puede configurar un objeto SoftwareSerial utilizando los pines digitales 8 y 10 de un Arduino UNO para la comunicación serie. Estos pines se conectarían a los pines RO y DI del módulo MAX485 respectivamente. Los pines RE y DE del MAX485 se conectarían a pines digitales adicionales para su control.
Comunicación Full-Duplex
La implementación de comunicación full-duplex con Arduino y RS-485 es más compleja y requiere más hardware. En este escenario, se necesitarían dos módulos MAX485 por cada Arduino: uno dedicado a la transmisión y otro dedicado a la recepción. Cada Arduino tendría dos puertos serie (hardware o software) para gestionar estas dos vías de comunicación independientes.
Protocolos de Comunicación sobre RS-485
Si bien el RS-485 define la capa física de la comunicación (cómo se transmiten las señales eléctricas), no especifica la estructura de los datos ni el protocolo de alto nivel. Para ello, se utilizan protocolos de comunicación.
Modbus
Uno de los protocolos más extendidos y utilizados sobre RS-485 en entornos industriales es Modbus. Modbus es un protocolo de comunicación en serie que permite a los dispositivos industriales intercambiar información. Se utiliza comúnmente en sistemas SCADA (Supervisory Control and Data Acquisition) en fábricas, parques fotovoltaicos y otras instalaciones de automatización. Modbus opera bajo una arquitectura maestro-esclavo y define formatos de trama para solicitar y recibir datos de dispositivos esclavos. El protocolo Modbus es un tema extenso y va más allá del alcance de este artículo, pero su implementación sobre RS-485 es una práctica muy común.
Arquitecturas Maestro-Esclavo y Direccionamiento
En redes RS-485 con múltiples dispositivos esclavos, es necesario un mecanismo para dirigir los comandos al esclavo correcto. El estándar RS-485 no impone una estructura para enviar datos, por lo que se deben implementar esquemas de direccionamiento a nivel de software.
En una red con varios esclavos, el maestro debe incluir un identificador único para cada esclavo en el mensaje. El código del esclavo debe entonces filtrar los mensajes entrantes y procesar solo aquellos que están dirigidos a él. La constante MY_SLAVE_ID en el código del esclavo se utiliza para este propósito, asegurando que cada dispositivo responda solo a sus propios comandos.
Comparativa con Otros Estándares: RS-232 y CAN
Para comprender mejor las ventajas del RS-485, es útil compararlo con otros estándares de comunicación serial comunes:
RS-232
El estándar RS-232 es uno de los más antiguos y se utiliza comúnmente para comunicaciones a corta distancia y baja velocidad, como la conexión de módems o consolas de depuración. Uno de sus principales inconvenientes es la falta de inmunidad al ruido en sus líneas de señal. Los cambios en el nivel de tierra pueden tener efectos desastrosos. El nivel de activación de la interfaz RS-232 es relativamente alto (±3 voltios), lo que lo hace más sensible a las fluctuaciones eléctricas. Además, el RS-232 solo permite un transmisor y un receptor en cada línea, lo que limita su capacidad de red.
RS-485 vs. RS-232
Las comunicaciones con RS-485, por el contrario, no dependen de una línea común como referencia de señal. Las señales RS-485 están "flotando" y se transmiten a través de pares diferenciales (SIGNAL+ y SIGNAL-). Esto evita la existencia de bucles de tierra, una fuente común de problemas de comunicación. Los campos magnéticos pueden afectar las señales, pero el diseño diferencial y el uso de pares trenzados permiten que las comunicaciones RS-485 alcancen distancias mucho más largas y velocidades de bits más altas que las posibles con conexiones no diferenciales como RS-232.
Bus CAN
El bus CAN (Controller Area Network) es otro protocolo muy extendido en el sector industrial, similar al RS-485 en su robustez y aplicabilidad industrial. Ambos protocolos emplean comunicación diferencial y son adecuados para entornos ruidosos. Sin embargo, CAN es un protocolo más complejo con capacidades de arbitraje de bus integradas, lo que lo hace ideal para redes donde varios nodos pueden necesitar transmitir datos de forma casi simultánea y con prioridades definidas. RS-485, por otro lado, ofrece una mayor flexibilidad en cuanto al número de nodos en la red y la simplicidad de su implementación.
RS-485 vs. RS-422
Es importante diferenciar RS-485 de RS-422. En RS-422, cada bus solo ofrece comunicación unidireccional. La comunicación bidireccional requiere dos buses RS-422 en paralelo, uno para cada dirección. En contraste, RS-485 es inherentemente bidireccional en un solo par de cables, permitiendo que varios dispositivos compartan el mismo bus para comunicaciones punto a punto o multipunto.
Máximas Capacidades y Limitaciones
El estándar RS-485 permite un máximo de 32 nodos "cargadores de bus" (bus loading units) en una red. Sin embargo, utilizando transceptores de alta impedancia, es posible conectar cientos de nodos en una red RS-485. A medida que las redes se hacen más grandes, el problema de las colisiones de datos se vuelve más relevante, lo que refuerza la necesidad de protocolos de gestión de acceso al medio o arquitecturas de maestro único.
La velocidad de comunicación en RS-485 puede ser significativamente alta, alcanzando hasta 10 Mbps con transceptores como el SP3485, especialmente en distancias cortas. Sin embargo, existe una relación inversa entre la distancia y la velocidad: cuanto mayor es la distancia, menor debe ser la velocidad de transmisión para mantener la integridad de la señal. Para redes que superan los 100 metros, se recomienda reducir la velocidad de transmisión y asegurar la correcta terminación del bus.
Conclusión Parcial
La comunicación RS-485, combinada con la versatilidad de plataformas como Arduino y el uso de transceptores eficientes como el MAX485, ofrece una solución potente y flexible para la transmisión de datos a larga distancia en aplicaciones industriales y de automatización. La comprensión de los modos de comunicación, las topologías de red, las consideraciones de cableado y los protocolos de alto nivel es fundamental para diseñar e implementar sistemas de comunicación fiables y eficientes.